
Исследователи недавно разработали роботизированную руку, способную изменять свою форму и свойства по желанию. Она может выдерживать большие нагрузки (до 1000 раз больше собственного веса), оставаясь при этом мягкой, как кожа, и прочной, как сталь. Этот прорыв основан на использовании полимера с памятью формы в сочетании с магнитными частицами.
Ученые постоянно исследуют новые возможности для расширения сфер применения робототехники. В последние годы особый интерес вызывает мягкая робототехника. Вдохновленная биологией, эта дисциплина нацелена на создание роботов из гибких материалов, способных имитировать адаптивность живых организмов. Такая гибкость снижает риск повреждений, особенно на пересеченной местности, а также имеет перспективное применение в биомедицине.
Несмотря на перспективность, мягкая робототехника сталкивается с рядом проблем, и не в последнюю очередь с выбором материалов. Силикон, который обычно используется, имеет механические ограничения, в том числе низкую несущую способность. Чтобы преодолеть эти препятствия, некоторые исследователи ищут другие пути, в том числе использование пневматических систем для регулировки жесткости по мере необходимости. Однако такие решения часто имеют ограниченный диапазон жесткости, что снижает их адаптируемость к различным ситуациям.
В недавнем исследовании, опубликованном в журнале , ученые из Ульсанского национального университета науки и технологии в Южной Корее разработали новый гибкий магнитный материал, который они использовали для создания роботизированной руки. Эта технология обеспечивает исключительно широкий диапазон жесткости и очень высокую несущую способность.
Регулируемая жесткость и беспрецедентная прочность
Роботизированная рука состоит из двух основных материалов: полимера с памятью формы и магнитных частиц. Система может переходить из мягкого в жесткое состояние, причем жесткость между этими двумя состояниями увеличивается более чем в 2 700 раз. Модуль Юнга при этом изменяется в диапазоне от 110 килопаскалей до 297 мегапаскалей, причем это изменение происходит под воздействием изменения температуры.
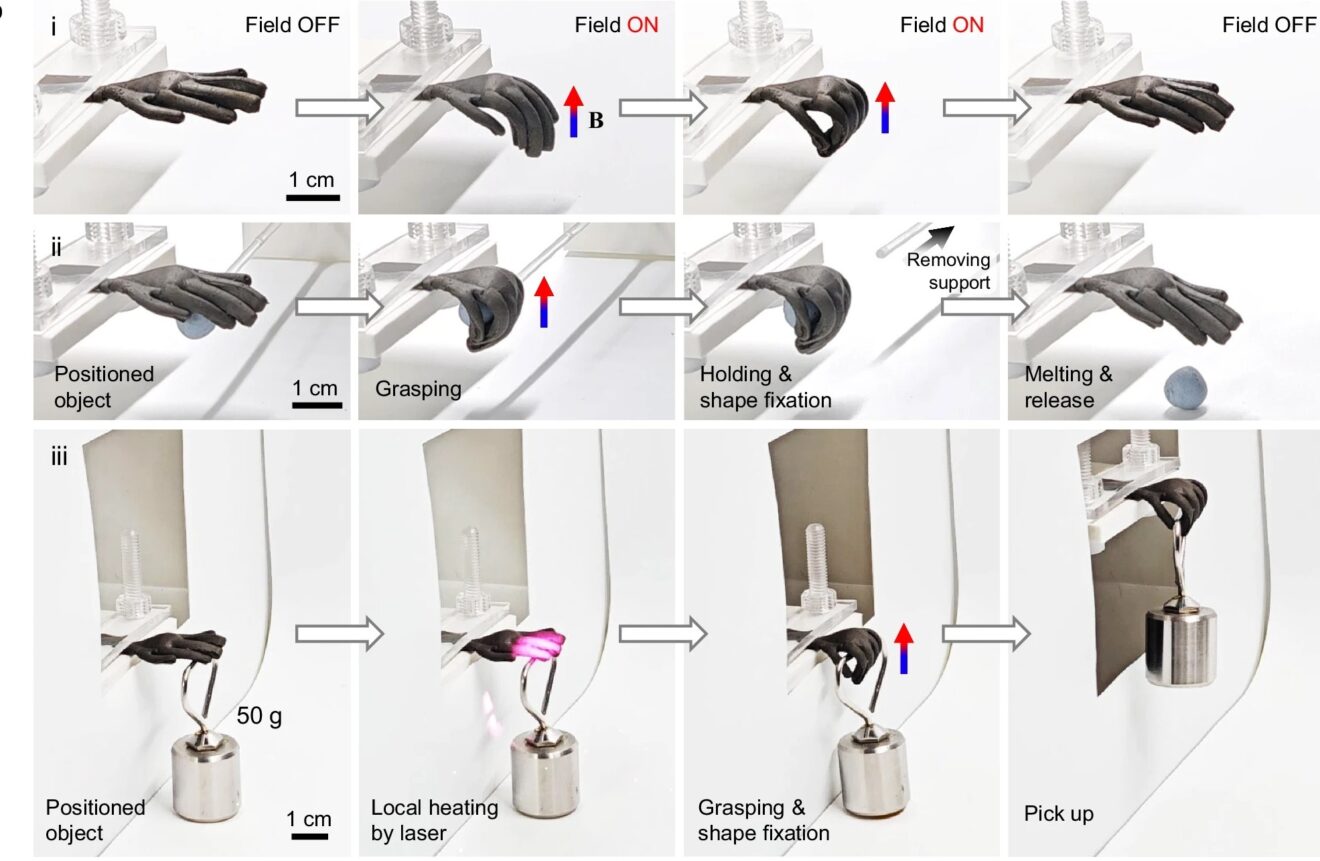
Кроме всего прочего, руку можно запрограммировать на манипулирование предметами, причем ее движения будут контролироваться внешним магнитным полем, отсюда и полезность магнитных частиц. Композитный материал имеет очень высокое соотношение полезной нагрузки и веса.
При растяжении он может выдерживать нагрузку, в 1000 раз превышающую его собственный вес, а при сжатии это соотношение возрастает до 3690. Система также позволяет выполнять различные управляемые движения: растяжение, сжатие, сгибание и скручивание. Она может удлиняться до 800 % от своей первоначальной длины.
Работа с тепловой модуляцией
Робот размягчается под воздействием тепла, деформируясь в зависимости от потребностей: растяжение, сжатие или скручивание. Его действия точно контролируются магнитным полем. Чтобы заморозить деформированное положение, систему достаточно охладить до комнатной температуры. Возврат к исходному состоянию также достигается путем нагрева без магнитного поля, при этом материал возвращается в «запертое» состояние благодаря свойствам памяти формы.
Читайте все последние новости технологии на New-Science.ru